Autonomous Mobility
Solutions
Empowering autonomous technologies with precise, high-quality data for safer and smarter mobility systems.

Precise Data
For autonomous Applications
HIGH-QUALITY DATA
iMerit delivers consistently accurate and reliable annotations through robust QA processes, ensuring data that meets the exacting standards of AI model development
MULTIMODAL TOOLING
Flexible platform supports seamless annotation across video, LiDAR, radar, imagery, and more—enabling end-to-end labeling for complex, sensor-rich use cases.
EXPERIENCED WORKFORCE
With a highly trained, domain-specialized workforce, iMerit combines human expertise with advanced tools to tackle even the most nuanced annotation challenges at scale.
Experience Matters
EXPERIENCE IN CREATING
AUTONOMOUS MOBILITY SOLUTIONS
FULL-TIME WORKFORCE AND EXPERTS IN AI DATA AND TOOLING
DATA POINTS CREATED FOR AUTONOMOUS USE CASES


DATA THAT POWERS
EVERY INDUSTRY
AUTONOMOUS VEHICLES
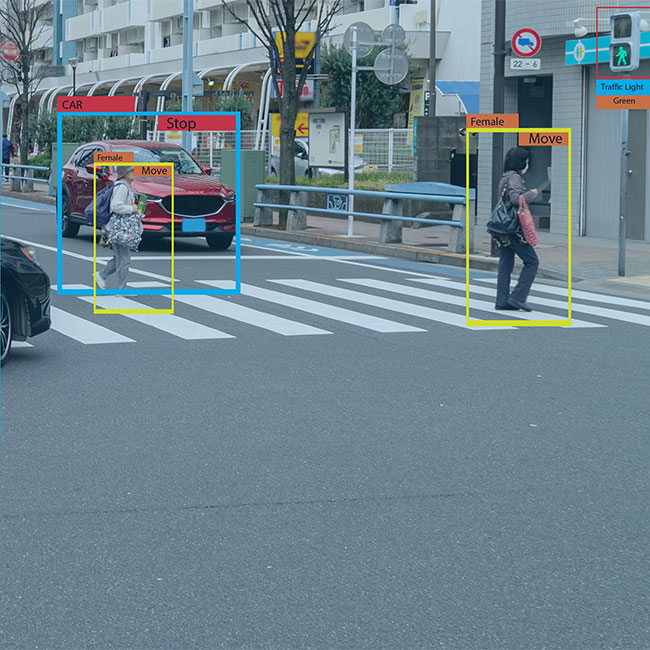
iMerit enhances AV perception systems by delivering high-quality annotated data—such as 2D/3D bounding boxes and semantic segmentation—for training models to detect pedestrians, vehicles, road signs, and other critical elements in complex urban environments.

TRUCKING & FREIGHT
iMerit supports long-range object detection and highway scene understanding through precisely labeled LiDAR and camera data, enabling robust navigation in high-speed logistics scenarios.

AGRICULTURAL Robotics
iMerit accelerates the development of autonomous farming solutions by annotating drone and ground-level imagery for crop classification, weed detection, and fruit counting —enabling robots to perform precision agriculture tasks like harvesting, spraying, and yield estimation with greater accuracy.
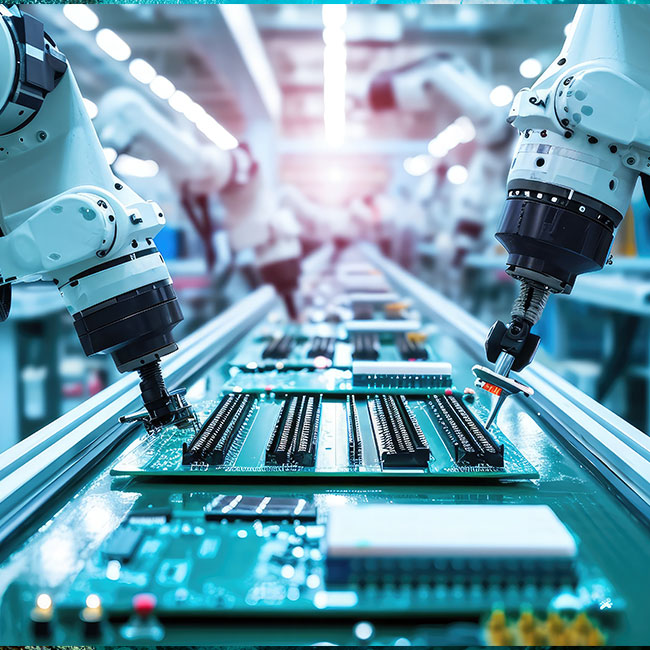
MANUFACTURING Robotics
iMerit provides detailed annotations for visual inspection systems—labeling defects, components, and assembly states across varied product lines—to enhance robotic accuracy in quality control, pick-and-place tasks, and predictive maintenance workflows.

AERIAL MOBILITY
From drones to eVTOL aircraft, iMerit provides labeled aerial imagery and video annotation—supporting object detection, terrain mapping, and navigation—critical for enabling safe flight paths and accurate landing zones.

MARITIME SYSTEMS
iMerit aids in the development of autonomous surface and underwater vehicles by labeling sonar, video, and radar data to detect obstacles, marine vessels, and environmental features in challenging oceanic conditions.
MULTI-SENSOR FUSION
FOR YOUR AUTONOMOUS APPLICATIONS
Our tools enable a comprehensive understanding of both 3D and 2D data, ensuring precise labeling with high accuracy and consistency across multiple sensor modalities. Built-in automation enhances annotation accuracy, streamlines workflows, and improves object detection and tracking, making multi-sensor fusion and perception modeling more efficient and reliable.
DATA AT EVERY STAGE
FOR PERCEPTION TEAMS
We help product, engineering, and data teams in leading enterprises by delivering highly-accurate annotations cost-effectively at scale for AI commercialization. Here’s how we do it:
CASE STUDIES
HIGH-QUALITY DATA
GUARANTEED
iMerit guarantees high-quality data through rigorous multi-stage QA workflows, expert workforce training, and domain-specific annotation protocols tailored for autonomous mobility use cases. This ensures consistently accurate, scalable datasets that meet the precision and safety standards required to train and validate advanced perception systems.
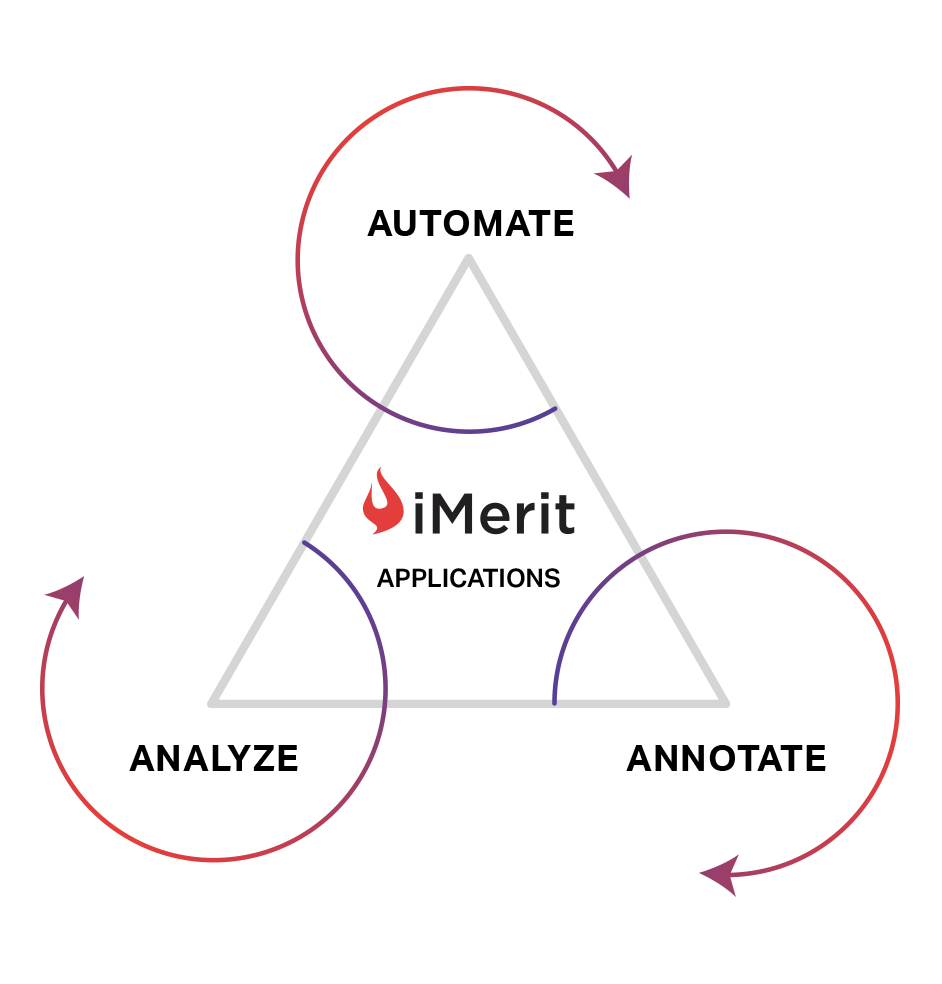
AUTOMATE
With AI-powered tools for automatic object detection and labeling, iMerit accelerates the annotation process while minimizing time spent on manual data preparation.
ANNOTATE
We leverage technology, including our in-house tools, your tools, or other third party tools, to deliver high-quality data for projects of any size across any industry.
ANALYZE
With real-time reports and dashboards, iMerit empowers data teams with actionable intelligence, KPI tracking, quick troubleshooting, and edge case management.
For autonomous Applications
Precise Data
HD MAPPING
The creation and validation of high-definition maps by precisely labeling road features, lane boundaries, and static infrastructure, providing the spatial context autonomous vehicles need for safe and accurate navigation.
3D POINT CLOUD
With advanced tools and expert annotators, iMerit delivers high-precision 3D point cloud labeling for LiDAR data, enabling reliable object detection, segmentation, and depth perception in complex driving environments.
MULTI-SENSOR FUSION
iMerit specializes in synchronizing and annotating data across LiDAR, radar, and camera inputs, helping clients train perception models that reflect the full richness and complexity of real-world driving scenarios.
IN-CABIN DRIVER MONITORING
iMerit supports driver state monitoring systems by annotating facial expressions, gaze direction, and hand positions, enabling models to detect distraction, fatigue, or unsafe behaviors in real time.
IN-CABIN OCCUPANT MONITORING
Through detailed labeling of posture, body movements, and seat occupancy, iMerit helps clients develop occupant-aware systems for comfort control, child presence detection, and emergency response scenarios.
INFOTAINMENT SYSTEMS
iMerit enhances the development of intuitive in-vehicle interfaces by annotating gesture, voice, and touch interactions—fueling smarter infotainment systems that respond seamlessly to occupant inputs.
EDGE CASE SOLUTIONING
iMerit identifies, curates, and annotates rare or anomalous scenarios—such as construction zones, emergency vehicles, and occlusions—ensuring robust model performance in critical edge-case situations.
TESTING & SIMULATION
Supports simulation workflows by creating and validating richly annotated datasets that can be replayed in virtual environments, accelerating the testing of AV algorithms under controlled, repeatable conditions.
SYNTHETIC DATA
Enhances synthetic dataset pipelines by validating and refining generated annotations, bridging the gap between real-world complexity and synthetic scalability to improve model generalization.
GET STARTED
TODAY!
The need for speed in high-quality data annotation has never been greater. iMerit combines the best of predictive and automated annotation technology with world-class data annotation and subject matter experts to deliver the data you need to get to production, fast.